
Dans la rubrique précédente"Classification des moteurs électriques", j'ai expliqué les différents types de moteur Brushed DC (BDC) qui comme dans le schéma suivant :

Aujourd'hui, je vais expliquer le moteur Brushless DC (BLDC) et les moteurs à induction AC comme suit.
Vous pouvez passer en revue les sujets connexes suivants pour examen et une bonne suite.
Composants de base des moteurs électriques
2- Moteurs à courant continu sans balais
|
Moteurs à courant continu sans balais |

Dans les moteurs à courant continu à balais, le collecteur mécanique et les balais associés sont problématiques pour plusieurs raisons comme suit :
L'usure des balais se produit et elle augmente considérablement dans un environnement à basse pression.
Les étincelles des balais peuvent provoquer des explosions si l'environnement contient des matières explosives.
Le bruit RF des brosses peut interférer avec les téléviseurs à proximité, les appareils électroniques, etc.
Les moteurs à courant continu sans balais (BLDC) sont l'un des types de moteurs qui gagnent rapidement en popularité. Les moteurs BLDC sont utilisés dans des secteurs tels que les appareils électroménagers, l'automobile, l'aérospatiale, la consommation, le médical, les équipements d'automatisation industrielle et l'instrumentation.
Comme son nom l'indique, les moteurs BLDC n'utilisent pas de balais pour la commutation ; au lieu de cela, ils sont commutés électroniquement.
Les moteurs BLDC présentent de nombreux avantages par rapport aux moteurs à courant continu à balais et aux moteurs à induction, dont voici quelques-uns :
Meilleure vitesse par rapport aux caractéristiques de couple.
Réponse dynamique élevée.
Haute efficacité.
Longue durée de vie.
Fonctionnement silencieux.
Plages de vitesse plus élevées.
De plus, le rapport entre le couple fourni et la taille du moteur est plus élevé, ce qui le rend utile dans les applications où l'espace et le poids sont des facteurs critiques.
Construction
Les moteurs BLDC sont un type de moteur synchrone. Cela signifie que le champ magnétique généré par le stator et le champ magnétique généré par le rotor tournent à la même fréquence.
Les moteurs BLDC sont disponibles dans des configurations monophasées, biphasées et triphasées. Correspondant à son type, le stator a le même nombre d'enroulements. Parmi ceux-ci, les moteurs triphasés sont les plus populaires et les plus utilisés.
1- Stator
|
Le stator d'un moteur BLDC |

Le stator d'un moteur BLDC est constitué de tôles d'acier empilées avec des enroulements placés dans des fentes découpées axialement le long de la périphérie interne.
La plupart des moteurs BLDC ont trois enroulements de stator connectés en étoile. Chacun de ces enroulements est construit avec de nombreuses bobines interconnectées pour former un enroulement. Une ou plusieurs bobines sont placées dans les fentes et elles sont interconnectées pour former un enroulement. Chacun de ces enroulements est réparti sur la périphérie du stator pour former un nombre pair de pôles.
En fonction de la capacité d'alimentation de la commande, le moteur avec la tension nominale correcte du stator peut être choisi. Des moteurs à tension nominale de quarante-huit volts ou moins sont utilisés dans l'automobile, la robotique, les mouvements des petits bras, etc. Les moteurs de 100 volts ou plus sont utilisés dans les appareils électroménagers, l'automatisation et les applications industrielles.
2- Rotor
|
Le rotor d'un moteur BLDC |

Le rotor est constitué d'un aimant permanent et peut varier de deux à huit paires de pôles avec des pôles Nord (N) et Sud (S) alternés.
|
Positions des aimants du rotor BLDC |
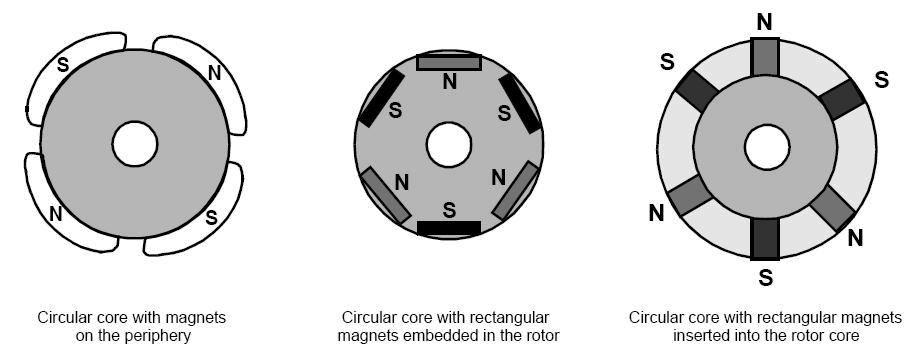
Sur la base de la densité de champ magnétique requise dans le rotor, le matériau magnétique approprié est choisi pour fabriquer le rotor. Les aimants en ferrite sont traditionnellement utilisés pour fabriquer des aimants permanents.
3- Capteurs à effet Hall
|
Capteurs à effet Hall BLDC |
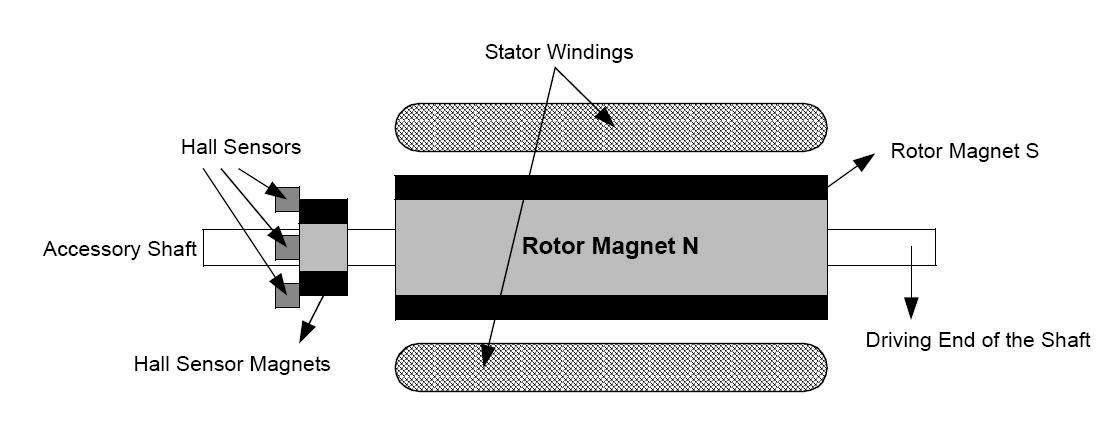
Contrairement à un moteur à courant continu à balais, la commutation d'un moteur BLDC est contrôlée électroniquement. Pour faire tourner le moteur BLDC, les enroulements du stator doivent être alimentés en séquence. Il est important de connaître la position du rotor pour comprendre quel enroulement sera mis sous tension après la séquence de mise sous tension. La position du rotor est détectée à l'aide de capteurs à effet Hall intégrés dans le stator.
La plupart des moteurs BLDC ont trois capteurs Hall intégrés dans le stator à l'extrémité non motrice du moteur.
Chaque fois que les pôles magnétiques du rotor passent près des capteurs à effet Hall, ils donnent un signal haut ou bas, indiquant que le pôle N ou S passe près des capteurs. Sur la base de la combinaison de ces trois signaux de capteur Hall, la séquence exacte de commutation peut être déterminée.
En fonction de la position physique des capteurs Hall, il existe deux versions de sortie. Les capteurs à effet Hall peuvent être à 60° ou 120° de déphasage les uns par rapport aux autres. Sur cette base, le constructeur du moteur définit la séquence de commutation, qui doit être suivie lors de la commande du moteur.
Remarque : Les capteurs à effet Hall nécessitent une alimentation électrique. La tension peut aller de 4 volts à 24 volts. Le courant requis peut aller de 5 à 15 oreillons.
Théorie du fonctionnement
Chaque séquence de commutation a l'un des enroulements alimenté à une puissance positive (le courant entre dans l'enroulement), le deuxième enroulement est négatif (le courant sort de l'enroulement) et le troisième est dans un état non alimenté.
Le couple est produit en raison de l'interaction entre le champ magnétique généré par les bobines du stator et les aimants permanents du rotor.
Pour maintenir le moteur en marche, le champ magnétique produit par les enroulements doit changer de position lorsque le rotor se déplace pour rattraper le champ du stator. Ce que l'on appelle la "commutation en six étapes" définit la séquence d'excitation des enroulements.
Dans une commutation en six étapes, seuls deux des trois enroulements du moteur à courant continu sans balais sont utilisés à la fois. Les marches sont équivalentes à 60 degrés électriques, donc six marches font une rotation complète de 360 degrés. Une boucle complète à 360 degrés peut contrôler le courant car il n'y a qu'un seul chemin de courant. La commutation en six étapes est généralement utile dans les applications nécessitant une vitesse et des fréquences de commutation élevées. Un moteur à courant continu sans balais à six étapes a généralement une efficacité de couple inférieure à celle d'un moteur à commutation sinusoïdale.
Applications typiques des moteurs BLDC
Nous pouvons classer le type de commande de moteur BLDC en trois types principaux :
Charge constante.
Charges variables.
Applications de positionnement.
1- Applications à charges constantes :
Ce sont les types d'applications où une vitesse variable est plus importante que de maintenir la précision de la vitesse à une vitesse définie. De plus, les taux d'accélération et de décélération ne changent pas dynamiquement. Dans ces types d'applications, la charge est directement couplée à l'arbre du moteur.
Par exemple, les ventilateurs, les pompes et les soufflantes relèvent de ces types d'applications. Ces applications nécessitent des contrôleurs à faible coût, fonctionnant principalement en boucle ouverte.
2- Applications avec des charges variables :
Ce sont les types d'applications où la charge sur le moteur varie sur une plage de vitesse. Ces applications peuvent exiger une précision de contrôle à grande vitesse et de bonnes réponses dynamiques.
Par exemple,
Appareils ménagers : laveuses, sécheuses et compresseurs.
Dans l'automobile, la commande de pompe à carburant, la commande de direction électronique, la commande de moteur et la commande de véhicule électrique.
Dans l'aérospatiale, il existe plusieurs applications, comme les centrifugeuses, les pompes, les commandes de bras robotiques, les commandes de gyroscope, etc.
Ces applications peuvent utiliser des dispositifs de retour de vitesse et peuvent fonctionner en boucle semi-fermée ou en boucle fermée totale.
3- Applications de positionnement :
La plupart des types d'applications industrielles et d'automatisation relèvent de cette catégorie. Les applications de cette catégorie ont une sorte de transmission de puissance, qui peut être des engrenages mécaniques ou des courroies temporisées, ou un simple système à entraînement par courroie. Dans ces applications, la réponse dynamique de la vitesse et du couple est importante. De plus, ces applications peuvent avoir une inversion fréquente du sens de rotation.
Ces systèmes fonctionnent principalement en boucle fermée.
Enfin, une comparaison entre un moteur à courant continu à balais (BDC) et un moteur à courant continu sans balais (BLDC) est illustrée dans l'image ci-dessous.

Deuxièmement : les moteurs à courant alternatif
Les moteurs à courant alternatif (AC) utilisent un courant électrique, qui inverse sa direction à intervalles réguliers.
Le principal avantage des moteurs à courant continu par rapport aux moteurs à courant alternatif est que la vitesse est plus difficile à contrôler pour les moteurs à courant alternatif. Pour compenser cela, les moteurs à courant alternatif peuvent être équipés de variateurs de fréquence, mais le contrôle de vitesse amélioré s'accompagne d'une qualité de puissance réduite.
Types de moteurs à courant alternatif :

Les moteurs à courant alternatif couramment utilisés aujourd'hui peuvent être divisés en deux grandes catégories :
Moteurs à induction (asynchrones).
Moteurs synchrones.
Moteurs linéaires.
Ces deux types de moteurs diffèrent par la manière dont l'excitation du champ rotorique est fournie comme suit :
Pour les moteurs à induction, il n'y a pas d'excitation du rotor appliquée de l'extérieur, et le courant est plutôt induit dans les enroulements du rotor en raison du champ magnétique tournant du stator.
Pour les moteurs synchrones, une excitation de champ est appliquée aux enroulements du rotor. Cette différence d'excitation de champ entraîne des différences dans les caractéristiques du moteur, ce qui entraîne à son tour des exigences de protection et de contrôle différentes pour chaque type de moteur.
1- Moteur à induction
Les moteurs à induction sont les moteurs les plus couramment utilisés pour divers équipements de l'industrie.
Moteur à induction : ainsi appelé parce que la tension est induite dans le rotor (donc pas besoin de balais), mais pour que cela se produise, le rotor doit tourner à une vitesse inférieure au champ magnétique pour permettre l'existence d'une tension induite.
Par conséquent, un nouveau terme est nécessaire pour décrire le moteur à induction qui est le glissement.
La glissade :
Un couple moteur ne peut exister que s'il y a un courant induit dans l'anneau d'ombrage. Il est déterminé par le courant dans l'anneau et ne peut exister que s'il y a une variation de flux dans l'anneau. Par conséquent, il doit y avoir une différence de vitesse dans l'anneau d'ombrage et le champ tournant. C'est pourquoi un moteur électrique fonctionnant selon le principe décrit ci-dessus est appelé « moteur asynchrone ».
La différence entre la vitesse synchrone (Ns) et la vitesse de l'anneau d'ombrage (N) est appelée « glissement » (s) et est exprimée en pourcentage de la vitesse synchrone.
S= (Nsyn – Nm)/ Nsyn
Où est la glissade ? Le glissement est l'une des variables les plus importantes dans le contrôle et le fonctionnement des machines à induction.
s=0 : si le rotor tourne à vitesse synchrone.
s=1 : si le rotor est immobile.
s est –ve : si le rotor tourne à une vitesse supérieure à la vitesse synchrone.
s est +ve : si le rotor tourne à une vitesse inférieure à la vitesse synchrone.
Avantages :
Conception simple, robuste, prix bas, entretien facile.
Large gamme de puissances nominales : puissances fractionnaires jusqu'à 10 MW.
Exécutez essentiellement à une vitesse constante de la charge nulle à la pleine charge.
Sa vitesse dépend de la fréquence de la source d'alimentation.
Moteur le plus populaire aujourd'hui dans la gamme de puissance faible et moyenne.
Construction très robuste.
Avoir remplacé les moteurs à courant continu dans les zones où les moteurs à courant continu traditionnels ne peuvent pas être utilisés, tels que les environnements miniers ou explosifs De deux types selon la construction du moteur ; Cage d'écureuil ou bague collectrice.
Désavantages:
Pas facile d'avoir un contrôle de vitesse variable.
Nécessite un entraînement électronique de puissance à fréquence variable pour un contrôle optimal de la vitesse.
La plupart d'entre eux fonctionnent avec un facteur de puissance en retard.
Principe d'opération:
Le stator est généralement connecté au réseau et, par conséquent, le stator est magnétisé.
Le champ magnétique du stator coupe les enroulements du rotor et produit une tension induite dans les enroulements du rotor.
Parce que les enroulements du rotor sont court-circuités, à la fois pour la cage d'écureuil et le rotor bobiné, et le courant induit circule dans les enroulements du rotor.
Le courant du rotor produit un autre champ magnétique.
Le couple est produit à la suite de l'interaction de ces deux champs magnétiques.
Construction:
Un moteur à induction a deux parties principales
1- Stator
|
Stator de moteur à induction |

C'est la partie immobile du moteur. Un corps en fonte ou en alliage léger abrite un anneau de fines plaques d'acier au silicium (environ 0,5 mm d'épaisseur). Les plaques sont isolées les unes des autres par oxydation ou un vernis isolant. Le « laminage » du circuit magnétique réduit les pertes par hystérésis et courants de Foucault.
Les plaques ont des encoches pour les enroulements du stator qui produiront le champ tournant dans lequel s'insérer (trois enroulements pour un moteur triphasé). Chaque enroulement est composé de plusieurs bobines. La façon dont les bobines sont reliées entre elles détermine le nombre de paires de pôles sur le moteur et donc la vitesse de rotation.
2- Rotor
C'est la partie mobile du moteur. Comme le circuit magnétique du stator, il est constitué de plaques empilées isolées les unes des autres et formant un cylindre calé sur l'arbre moteur.
Types de moteurs à induction
|
Types de moteurs à induction |

Les moteurs à induction sont classés selon le type de rotor comme suit :
A-Rotor à cage d'écureuil :

|
Rotor à cage d'écureuil |

Il est constitué de barres conductrices épaisses noyées dans des fentes parallèles. Ces barres sont court-circuitées aux deux extrémités à l'aide d'anneaux de court-circuit.
B-Rotor enroulé :

|
Rotor enroulé |

Il a un enroulement triphasé, double couche, distribué. Il est bobiné pour autant de pôles que le stator. Les trois phases sont câblées en interne et les autres extrémités sont reliées à des bagues collectrices montées sur un axe sur lesquelles reposent des balais.
Chacun des deux types de moteurs à induction ci-dessus peut être classé en deux groupes principaux comme suit :
I- Moteurs asynchrones monophasés :
Ceux-ci n'ont qu'un seul enroulement de stator, fonctionnent avec une alimentation monophasée, ont un rotor à cage d'écureuil et nécessitent un dispositif pour démarrer le moteur. C'est de loin le type de moteur le plus couramment utilisé dans les appareils électroménagers, tels que les ventilateurs, les machines à laver et les sèche-linge, et pour des applications allant jusqu'à 3 à 4 chevaux.
Les moteurs à induction monophasés sont également dotés d'un rotor bobiné qui présente d'excellentes caractéristiques de démarrage et d'accélération.
II- Moteurs asynchrones triphasés :
Le champ magnétique tournant est produit par l'alimentation triphasée équilibrée. Ces moteurs ont des capacités de puissance élevées, peuvent avoir des rotors à cage d'écureuil ou enroulés (bien que 90 % aient un rotor à cage d'écureuil) et sont à démarrage automatique. On estime qu'environ 70 % des moteurs de l'industrie sont de ce type et sont utilisés, par exemple, dans les pompes, les compresseurs, les bandes transporteuses, les réseaux électriques à usage intensif et les broyeurs. Ils sont disponibles en 1/3 à des centaines de puissances nominales.
Voyons maintenant la première classification des moteurs à induction basée sur les types ci-dessus :
1- Moteur à induction monophasé à cage d'écureuil :
Cette catégorie a de nombreux types comme indiqué dans l'image ci-dessous.

A- Moteurs à induction à pôles ombrés
Principe de construction et de fonctionnement :
|
Moteurs à induction à pôles ombragés |

Les moteurs à pôles ombrés n'ont qu'un seul enroulement principal et aucun enroulement de démarrage. Le démarrage consiste à utiliser une conception qui entoure une boucle de cuivre continue autour d'une petite partie de chacun des pôles du moteur. Cela « ombrage » cette partie du pôle, entraînant un retard du champ magnétique dans la zone ombrée par rapport au champ dans la zone non ombrée. La réaction des deux champs fait tourner l'arbre.
Avantages :
Parce que le moteur à pôles ombrés n'a pas d'enroulement de démarrage, d'interrupteur de démarrage ou de condensateur, il est électriquement simple et peu coûteux.
La vitesse peut être contrôlée simplement en faisant varier la tension ou via un enroulement multiprise.
Mécaniquement, la construction du moteur à pôles ombrés permet une production en grand volume.
Ceux-ci sont généralement considérés comme des moteurs «jetables», ce qui signifie qu'ils sont beaucoup moins chers à remplacer qu'à réparer.
Désavantages:
Son faible couple de démarrage est généralement de 25 à 75 % du couple nominal.
C'est un moteur à glissement élevé avec une vitesse de fonctionnement de 7 % à 10 % inférieure à la vitesse synchrone.
Généralement, le rendement de ce type de moteur est très faible (inférieur à 20 %).
Applications:
Le faible coût initial convient aux moteurs à pôles ombrés pour les applications de faible puissance ou de service léger. Peut-être que leur plus grande utilisation est dans les ventilateurs à plusieurs vitesses pour un usage domestique. Mais le faible couple, le faible rendement et les caractéristiques mécaniques moins robustes rendent les moteurs à pôles ombrés peu pratiques pour la plupart des utilisations industrielles ou commerciales, où des taux de cycle plus élevés ou un service continu sont la norme.
Dans le prochain sujet, je continuerai à expliquer d'autres types de moteur à induction à cage d'écureuil monophasé. Alors, continuez à suivre.





